4S20 |
|
Objectifs :
Définir le parcours du robot dans la pièce ci-dessous, en déduire une logique en
« langage naturel » puis en extraire un programme de type logigramme.
Compétences évaluées :
- CS 1.8 Utiliser une modélisation pour comprendre, formaliser, partager, construire,
investiguer, prouver.
- CT 4.2 Appliquer les principes élémentaires de l’algorithmique et du codage à la résolution
d’un problème simple.
- CT 5.1 Simuler numériquement la structure et/ou le comportement d’un objet.
Définir le parcours du robot dans la pièce ci-dessous, en déduire une logique en
« langage naturel » puis en extraire un programme de type logigramme.
Compétences évaluées :
- CS 1.8 Utiliser une modélisation pour comprendre, formaliser, partager, construire,
investiguer, prouver.
- CT 4.2 Appliquer les principes élémentaires de l’algorithmique et du codage à la résolution
d’un problème simple.
- CT 5.1 Simuler numériquement la structure et/ou le comportement d’un objet.
Fichiers / déroulé de la séquence
| robotprog11frsetup.exe |
|
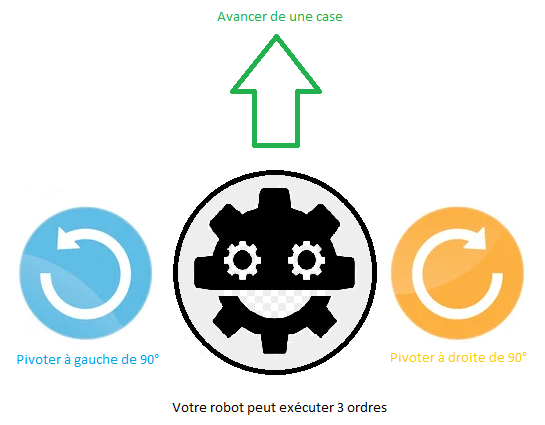
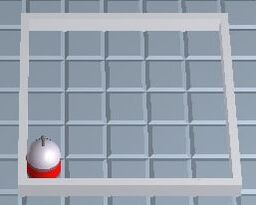
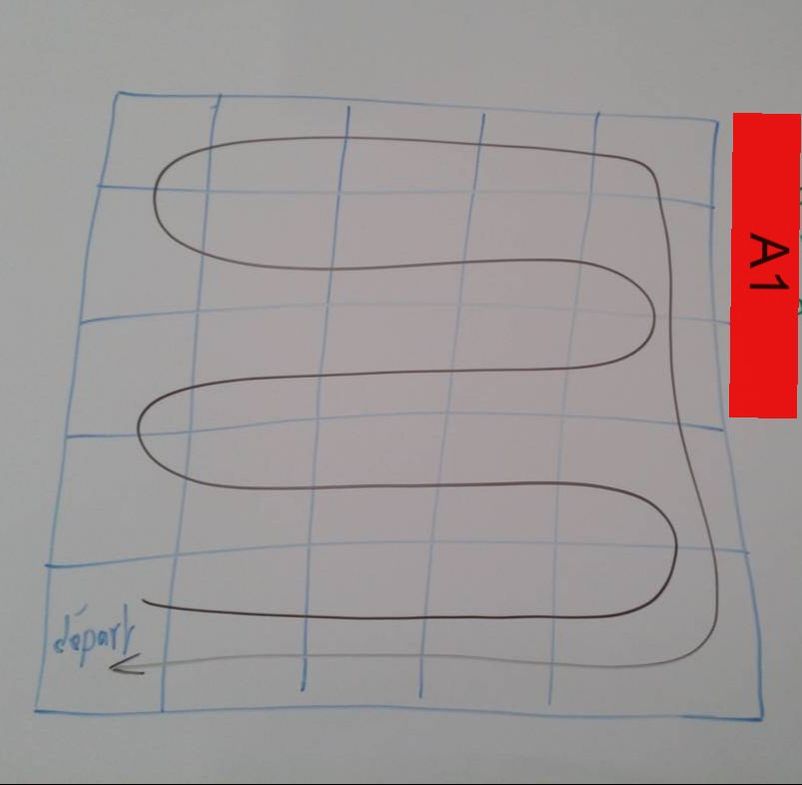
Problématique : Comment programmer le robot?
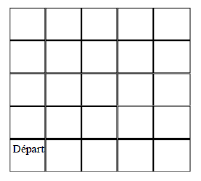
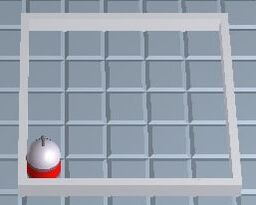
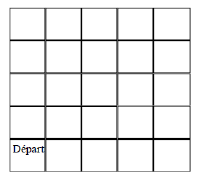
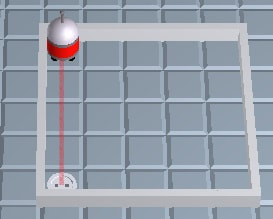
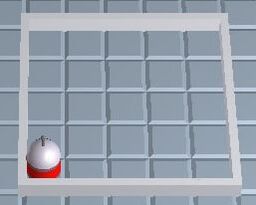
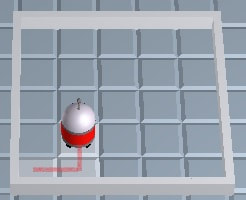
Activités 1) Compréhension du terrain : /4 En équipe de 2 : I) Sur la table, reproduire en bleu et en respectant le nombre de cases la disposition de la salle. Place le point de départ du robot. II) Tracer en noir le trajet que le robot doit réaliser afin de passer sur toutes les cases puis de revenir au point de départ. -> Recopiez ce que vous avez dessinez sur votre feuille (une feuille par personne). Seul sur votre feuille : III) Écrire ensuite les instructions sous forme de texte que vous donneriez au robot pour suivre votre trajet. Utilisez la forme que vous voulez (liste, paragraphe, ...). Synthèse : 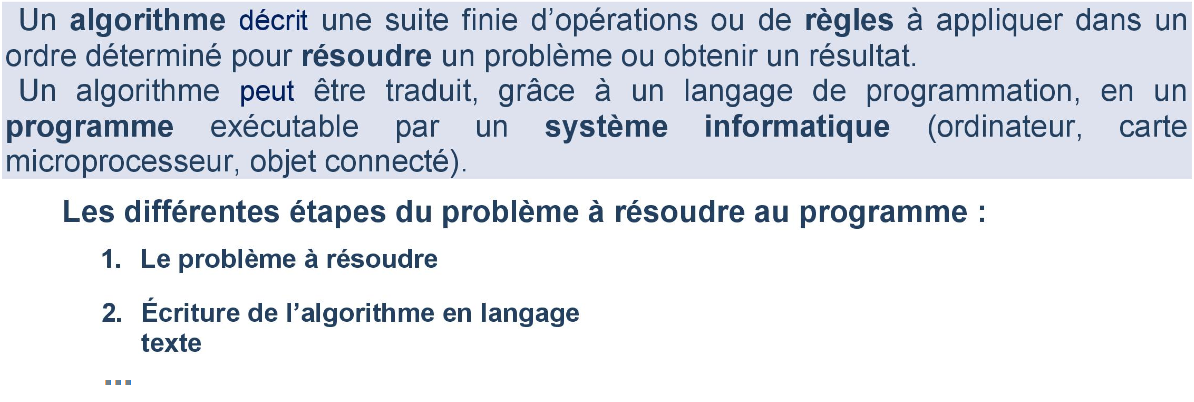
|
|
| 4_s20_robotprog_à_completer.odp |
| robotprog11frsetup.exe |
|
Problématique : Comment programmer avec RobotProg ?
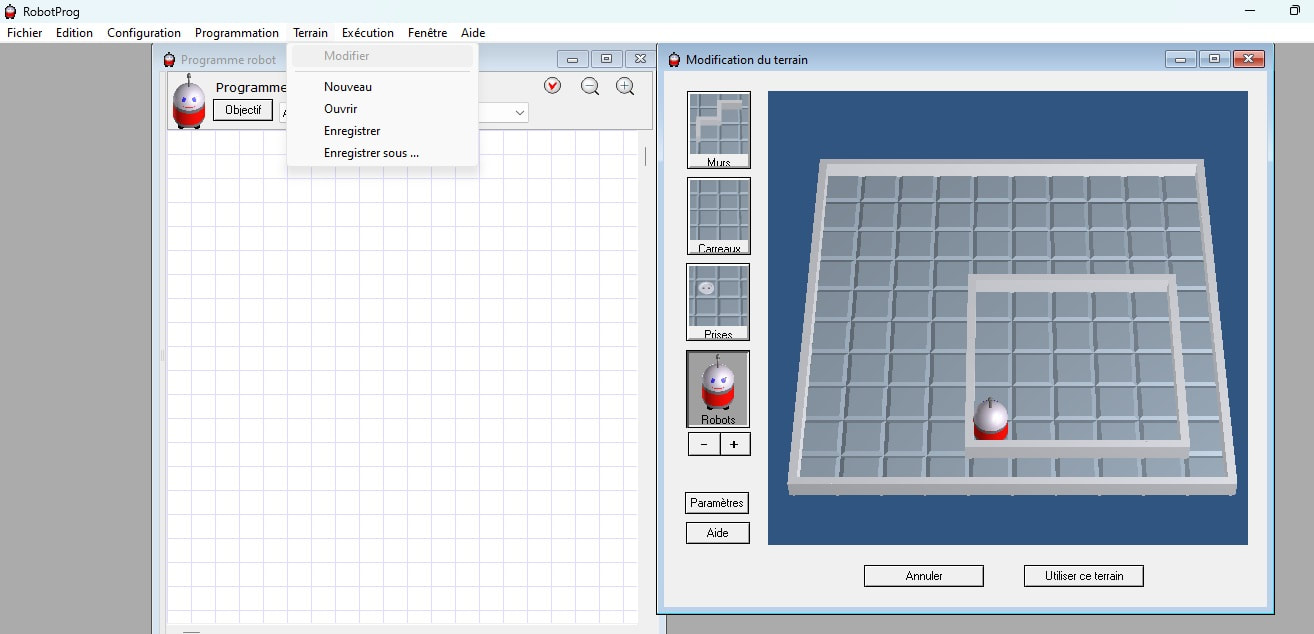
Activités 2) Création du terrain (d'une pièce) dans ROBOTPROG : /2 Expliquez avec vos mots comment vous vous y prenez pour modifier le terrain et déplacer le robot. |
|
| 4_s20_robotprog_à_completer.odp |
| robotprog11frsetup.exe |
|
"Problématique : Comment programmer le robot?
Activités 3) Déplacer le robot : /20 Seul ou en équipe de 2 : |
|
|
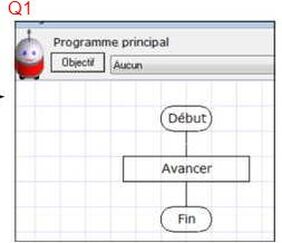
3.1) Avancer : /4
>Modifier le programme pour qu’il ressemble au schéma suivant (Q1) -> >Exécuter votre programme >Répondre aux questions par des phrases Questionnement : Q1 : Quelle est l’action du robot? Q2 : Que faut-il faire pour que le robot se déplace jusqu’au mur d'en face? Activité : >Modifier le programme pour que le robot arrive jusqu'au mur d'en face. >Tester le programme sur le logiciel puis le recopier sur votre feuille. Synthèse orale |

|
|
3.2) Tourner : /4
>Modifier le programme pour qu’il ressemble au schéma suivant (Q1) -> >Exécuter votre programme >Répondre aux questions par des phrases Questionnement : Q1 : Quelle est l’action du robot? Q2 : Que faut-il faire pour que le robot réalise le trajet suivant? Activité : > Dessiner le nouveau programme pour que le robot passe comme dans la question Q2. > Tester le programme sur le logiciel puis le recopier sur votre feuille. Synthèse orale |

|
|
3.3) Mon programme : /12
>Réaliser le programme que vous avez défini dans l'activité 1, pour que le robot passe par toutes les cases et retourne au point de départ, dans le bon sens. >Enregistrer votre programme régulièrement. > Tester le bon fonctionnement du programme sur le logiciel. /4 > Recopier le programme sur votre feuille. /4 >Prendre en photo le programme (capture d'écran). > Réaliser un montage avec le logiciel de votre choix où l'on peut voir : Photo du programme + CLASSE + NOM + Prénom > Enregistrer le fichier dans la zone indiquée par le professeur (sur le réseau de l'établissement) au format : CLASSE_NOM_prenom_A33 /4 Synthèse orale |
|
4) Les boucles :
|
4.1) Boucle de maintien : /4 >Modifier le programme pour qu’il ressemble au schéma suivant. La commande à utiliser est la suivante /!\ : Écrire à l’intérieur : MurEnFace En un mot et avec M, E et F en majuscule. >Exécuter votre programme >Répondre aux questions par des phrases Questionnement : Q1 : Quelle est l’action du robot dans ce nouveau programme ? Q2 : Que veut dire MurEnFace (lire l'aide) ? Q3 : Que veulent dire N et O dans le bloc de l'image /!\ MurEnFace ? Q4 : Quel est l'intérêt d'une "boucle de maintien", donner un exemple ? Q5 : En comparaison de la méthode trouvée en question 3.1, quel est l’avantage de l’utilisation de cette commande? Activité : >Dessiner le programme sur votre feuille. Synthèse orale |


|
|
4.2) Boucle d'attente : /4
>Modifier le programme pour qu’il ressemble au schéma suivant : >Exécuter votre programme (Ce programme contient une erreur intentionnelle) >Répondre aux questions par des phrases Questionnement : Q1 : Quelle est l’action du robot dans ce nouveau programme ? Q2 : D’après le programme précédent, pourquoi le robot a-t-il ce comportement? Q3 : Quel est l'intérêt d'une "boucle d'attente" dans un système, donner un exemple ? Activité : >Dessiner le programme sur votre feuille. Synthèse orale |

|
|
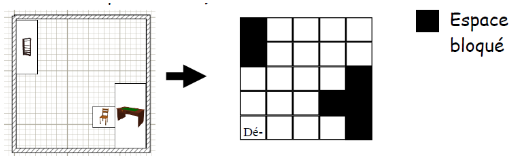
Activités 4.3) Application : /4
La pièce comprend maintenant un bureau, une chaise et une armoire. >Modifiez le terrain en ajoutant des murs pour bloquer au robot, les cases où se trouvent les meubles. >Testez le programme de la question 3.3) sans le modifier. Questionnement : Q1 : Que se passe-t-il pour le robot dans ce nouveau terrain ? Q2 : Le programme est-il adapté à tous les terrains, pourquoi ? Q3 : Que manque-t-il dans le programme du 3.3 ? Aidez-vous de ce que vous avez vu en 4.1 Synthèse orale |
|

Fichiers des activités réalisées
|

|

|
Ce Que Je Dois Retenir
| 1-dic15-4-otscis21-ip23_algorithme.pdf |
